



PWM و PID کنترل کننده
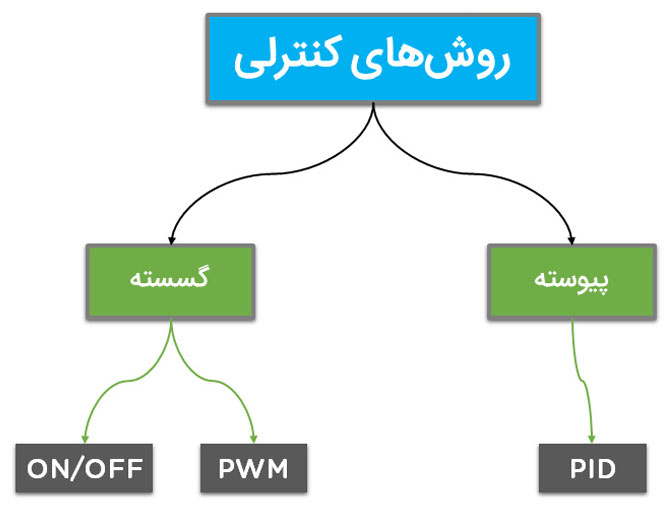
روشهای کنترلی به دو دسته: پیوسته و گسسته تقسیم میشوند، هرکدام از این بخشها نمایندگان ویژهای دارند که در ادامه به آنها خواهیم پرداخت.
کنترل گسسته
در این بخش با عناصر گسسته سروکار داریم و به همین دلیل عمدتاً از جبر و حساب استفاده میشود.
دو روش بسیار کاربردی در این بخش عبارتاند از: کنترل ON/OFF و کنترل PWM.
روش کنترل ON/OFF
سادهترین نوع کنترل یک فرآیند، به شکل کنترل دو وضعیتی یا اصطلاحاً ON/OFF است. کولرگازیهای قدیمی یک مثال از این نوع کنترل هستند.
مثلاً در مثال کولرگازی بهجای آنکه بگویند دقیقاً کولر در دمای بالای 18 درجه در سرویس قرار بگیرد و بهمحض رسید به 18 از سرویس خارج شود، یک محدودهای مثلاً 2 درجه را در نظر میگیرند. به این صورت که کولرگازی در دمای 20 درجه در سرویس قرار میگیرد و بعد ازآنکه به 18 رسید فوراً خاموش نمیشود بلکه اجازه میدهد بازهم دما کاهشیافته و به 16 درجه برسد و آنگاه خاموش میشود. با این روش بااینکه تعداد خاموش و روشنهای کولر کمتر است اما نوسان دمای خروجی بیشتر خواهد شد.
روش PWM
اگر بخواهیم یک مفهوم آنالوگ یا پیوسته را بهوسیله یک موج صرفاً صفر و یک ایجاد کنیم از این نوع کنترل استفاده میکنیم. درواقع PWM رابط بین دنیای دیجیتال و آنالوگ است. برای این کار زمان صفر و یک شدن بهگونهای تنظیم میشود که درنهایت میانگین این صفر و یک شدنها مقدار مطلوب را به دست دهد.
یکی از کاربردهای مهم تکنیک PWM استفاده از آن در اینورتر و درایوهای الکتریکی میباشد.
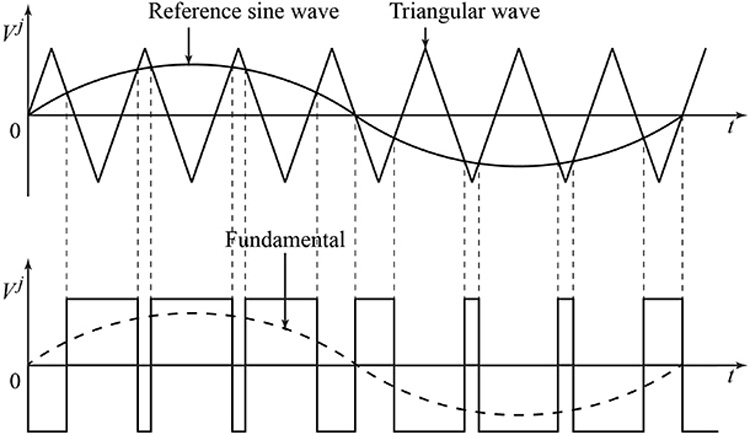
تولید موج سینوسی (Fundamental) با استفاده از تکنیک قطع موج مثلثی با موج سینوسی رفرنس
کنترل پیوسته
این روش به شکلی غیرمستقیم در مقابل نوع گسسته که صحبت شد قرار گرفته است. در نوع پیوسته عمدتاً از توابع مثلثاتی، مشتق و انتگرال استفاده میشود.
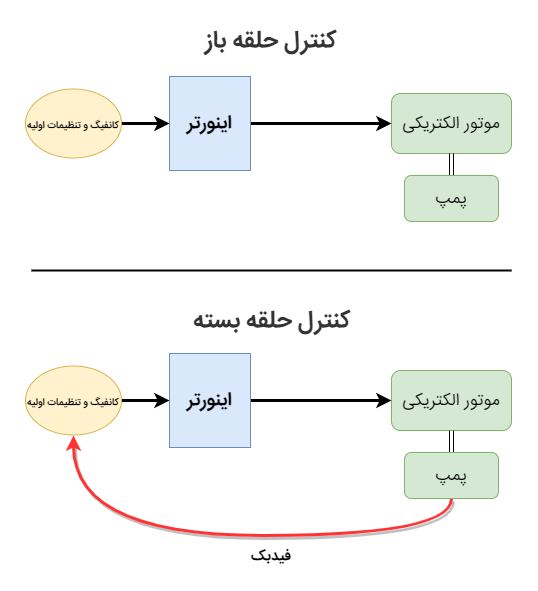
بهعنوانمثال اگر ما پمپی داشته باشیم که بخواهیم در خروجیاش، فشار آب ثابتی را به ما بدهد، میتوانیم سرعت اینورتر روی آن را بهصورت دستی روی مقدار ثابتی قرار دهیم و امیدوار باشیم که فشار در تمامی لحظات روی مدار ثابت بماند، و شبها هم میتوانیم کمی سرعت اینورتر را کم کنیم. این یک کنترل حلقه باز است.
راهحل بهتر بهکارگیری یک سنسور فشار و اتصال سیگنال آن به اینورتر است. اینورتر مقدار واقعی (یعنی اندازهگیری شده) فشار را با مقدار مطلوب (نقطه مرجع موردنظر) مقایسه میکند و سرعت پمپ را دائماً تغییر میدهد تا فشار را در مقدار ثابتی نگه دارد. ازآنجاکه اتصال سنسور فشار یک حلقه تشکیل میدهد (اینورتر – موتور – پمپ – سنسور) این سیستمها به سیستمهای کنترلی حلقه بسته شهرت دارند. مقایسه این دو نوع کنترل در تصویر زیر آمده است.
کنترل حلقه بسته کاربردهای زیادی دارد، از سیستمهای تثبیتکننده هواپیما گرفته تا کنترل تنش در سیستمهای سیمپیچی، و همچنین کاربردهای سادهتری مثل تثبیت فشار، سرعت جریان یا دما.
مسئله مهم در کنترل حلقه بسته، پایداری است. در این سیستم با پردازش صحیح خطا میتوان پایداری را ایجاد کرد. خط اتلاف بین نقطه مرجع و مقدار واقعی، سیگنال فیدبک یا اندازهگیری است. درنهایت خطا به سیستم کنترلی داده میشود که در مثال بالا همان اینورتر است. اینورتر باید بتواند با پردازش سریع خطای موجود را پردازش و برطرف کند.
تعریف PID
کنترلکننده پیآیدی یا Proportional–Integral–Derivative یک سیستم کنترلی بر پایه فیدبک (بازخورد) میباشد که هدف اصلی آن نزدیک کردن نتیجه نهایی فرآیند به مقدار مدنظر ما میباشد. به زبان سادهتر، تمام دغدغه یک کنترلکننده PID، هدایت سیستم بهطرف یک سطح، موقعیت و یا هر مقداری که ما مشخص میکنیم، میباشد.
PID کنترلرها در صنعت جزء دقیقترین و پایدارترین کنترلکنندهها بهحساب میآیند و عمدتاً از آنها در راستای خودکارسازی (یا بخشی از یک اتوماسیون) کارها برای نزدیک شدن (تا جای ممکن) به خروجی از پیش تنظیم شده یا هدفی مشخص استفاده میکنیم.
بیش از 90% سیستمهای کنترلی از PID بهعنوان کنترلکننده بازخوردی استفاده میکنند.
به خاطرعملکرد قوی و سادگی عملکردی، این روش توسط عمده شرکتهای مطرح دنیا در زمینه ساخت کنترلر پذیرفته شده است و از آن در محصولات خود استفاده میکنند.
در کنترلکننده PID دو تعریف “خطا” و “SetPoint” از اهمیت بالایی برخوردار هستند. ستپوینت در اینجا به معنای نقطه مدنظر (سطح، موقعیت، کمیت و یا هر چیزی که ما میخواهیم در سیستم کنترلی به آن برسیم) میباشد و از طرف دیگر خطا به میزان انحراف (اختلاف) میان نقطه مدنظر و مقدار نهایی خروجی گفته میشود. نگفته پیداست که هرچه خطا کمتر باشد بهتر بوده و بدین معناست که ما توانستهایم مقدار نهایی سیستم را با مقدار مدنظر خودمان دقیقاً یکی نماییم.
برای رسیدن به این نقطه مطلوب (خطا = صفر، مقدار خروجی سیستم = SetPoint) سیستم کنترلی PID از سه عملگر به نامهای؛ تناسبی (Proportional)، انتگرالگیر (Integral) و مشتقگیر (Derivative) استفاده میکند. این سه ضریب پایه در هر کنترلر پی آی دی برای کاربردهای خاص بهمنظور رسیدن به واکنش بهینه متغیر هستند. در ادامۀ بحث به شکلی مفصل به این ضرایب و نحوه عملکرد آنها خواهیم پرداخت.
ضریب تناسبی باعث ایجاد یک کنترل صاف و بدون تغییرات شدید میگردد، ضریب انتگرالی به طور خودکار خطای سیستم را اصلاح میکند و درنهایت کنترل مشتق بهسرعت به اختلالات پاسخ میدهد.
دیاگرام عملکرد PID
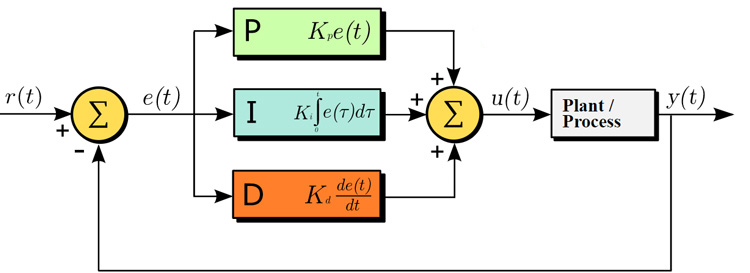
جهت رسیدن به بهترین نقطه عملکردی PID باید مقدار هرکدام از ضرایب P، I و D را در کنار هم محاسبه کرده و درنهایت بهترین مقادیر را استفاده نمود.